
- Figure 1.1 – Mechatronic system components
- Figure 1.2 – Inkjet printer components
- Figure 1.3 – Elements of a measurement system
- Example 1.2 – Measurement system – digital thermometer
- Figure 1.4 – Functional diagram of the DC motor speed controller
- Figure 1.5 – Photograph of the power-amp speed controller
- Figure 1.6 – Functional diagram of the stepper motor position and speed controller
- Figure 1.7 – Photograph of the stepper motor position and speed controller
- Figure 1.8 – Functional diagram for the DC motor position and speed controller
- Figure 1.9 – Photograph of the DC motor position and speed controller
- Chapter 2 – Mechatronic system components outline
- Figure 2.1 – Electrical circuits
- Figure 2.2 – Electric circuit terminology
- Figure 2.3 – Basic electrical elements
- Figure 2.4 – Examples of basic circuit elements
- Figure 2.5 – Voltage-current relation for an ideal resistor
- Figure 2.6 – Wire resistance
- Figure 2.7 – Resistor packaging
- Figure 2.8 – Examples of resistor packaging
- Figure 2.9 – Axial-lead resistor color bands
- Figure 2.10 – Potentiometer schematic symbols
- Figure 2.11 – Parallel plate capacitor
- Figure 2.12 – Inductor flux linkage
- Figure 2.13 – Kirchhoff’s voltage law
- Example 2.3 – Kirchoff’s voltage law
- Figure 2.14 – Kirchhoff’s current law
- Figure 2.15 – Series resistance circuit
- Figure 2.16 – Parallel resistance circuit
- Example 2.4 – Circuit analysis (part a, part b)
- Figure 2.17 – Circuit schematic connection conventions
- Figure 2.18 – Real voltage source with output impedance
- Figure 2.19 – Example of a commercially available power supply
- Figure 2.20 – Real current source with output impedance
- Figure 2.21 – Real ammeter with input impedance
- Figure 2.22 – Real voltmeter with input impedance
- Figure 2.23 – Examples of commercially available digital multimeters
- Figure 2.24 – Example of a commercially available oscilloscope
- Example 2.5 – Input and output impedance (part a, part b, part c, part d)
- Figure 2.25 – Example illustrating Thevenin’s theorem
- Figure 2.26 – Thevenin equivalent circuit
- Figure 2.27 – Norton equivalent circuit
- Figure 2.28 – Sinusoidal waveform
- Figure 2.29 – Sinusoidal signal DC offset
- Figure 2.30 – Phasor representation of a sinusoidal signal
- Example 2.7 – AC circuit analysis
- Figure 2.31 – Power in a circuit element
- Figure 2.32 – Transformer
- Figure 2.33 – Signal termination
- Figure 2.34 – Impedance matching—string analogy
- Figure 2.35 – Impedance matching
- Figure 2.36 – Breadboard
- Figure 2.37 – Example resistor circuit schematic
- Figure 2.38 – Example Breadboard Circuit
- Figure 2.39 – Measuring voltage (part a, part b)
- Figure 2.40 – Measuring current (part a, part b)
- Figure 2.41 – Soldering iron
- Figure 2.42 – Preparing a soldered joint
- Figure 2.43 – Successful solder joint
- Figure 2.44 – Removing a soldered joint
- Figure 2.45 – Oscilloscope coupling
- Figure 2.46 – Common ground connection
- Figure 2.47 – Relative ground connection
- Figure 2.48 – Common ground
- Figure 2.49 – Inductive coupling
- Figure 2.50 – Ground loop
- Figure 2.51 – Three-prong AC power plug
- Chapter 3 – Mechatronic system components outline
- Figure 3.1 – Valence and conduction bands of materials
- Figure 3.2 – pn junction characteristics
- Figure 3.3 – Silicon diode
- Figure 3.4 – Examples of common diodes
- Figure 3.5 – Diode check valve analogy
- Figure 3.6 – Ideal, approximate, and real diode curves
- Example 3.1 – Half-wave rectifier circuit assuming an ideal diode (part a, part b)
- Figure 3.7 – AC-to-DC converter with full-bridge rectifier
- Figure 3.8 -Full-bridge rectifier action
- Figure 3.9 – Inductive load flyback protection
- Figure 3.10 – Flyback action
- Figure 3.11 – Light-emitting diode (LED)
- Figure 3.12 – Typical LED circuit in digital systems
- Figure 3.13 – Photodiode light detector circuit
- Example 3.3 – Analysis of circuits with more than one diode (part a, part b, part c, part d, part e)
- Figure 3.14 – Zener diode symbol and current-voltage relationship
- Figure 3.15 – Zener diode voltage regulator
- Figure 3.16 – Zener diode voltage regulator circuit
- Figure 3.17 – 15 V regulated DC supply
- Figure 3.18 – 1.2 to 37 V adjustable regulator
- Figure 3.19 – npn bipolar junction transistor
- Figure 3.20 – pnp bipolar junction transistor
- Figure 3.21 – Common emitter circuit
- Figure 3.22 – Common emitter characteristics for a transistor
- Example 3.4 – Guaranteeing a transistor is in saturation
- Figure 3.23 – Transistor experiments
- Figure 3.24 – Common emitter experimental results
- Figure 3.25 – Emitter degeneration experimental results
- Figure 3.26 – Transistor switch circuit
- Figure 3.27 – Models for transistor switch states
- Design Example 3.2 – LED Switch
- Figure 3.28 – Bipolar transistor packages
- Figure 3.28 – Various common transistor packages
- Figure 3.30 – Darlington pair
- Figure 3.31 – Opto-isolator
- Design Example 3.3 – Angular position of a robotic scanner (part a, part b)
- Figure 3.32 – n-channel enhancement-mode MOSFET
- Figure 3.33 – Enhancement-mode MOSFET n-channel formation
- Figure 3.34 – n-channel enhancement-mode MOSFET characteristic curves
- Figure 3.35 – MOSFET experiment
- Figure 3.36 – p-channel enhancement-mode MOSFET
- Figure 3.37 – Field effect transistor schemativ symbols
- Figure 3.38 – MOSFET power switch circuit
- Figure 3.39 – MOSFET analog switch circuit
- Design Example 3.4 – Circuit to switch power
- Chapter 4 – Mechatronic system components outline
- Figure 4.1 – Measurement system input-output
- Figure 4.2 – Amplitude linearity and nonlinearity
- Figure 4.3 – Square wave
- Figure 4.4 – Harmonic decomposition of a square wave
- Figure 4.5 – Spectrum of a square wave
- Figure 4.6 – Frequency response and bandwidth
- Figure 4.7 – Effect of measurement system bandwidth on signal spectrum
- Example 4.1 – Bandwidth of an electrical network (part a, part b)
- Figure 4.8 – Relationship between phase and time displacement
- Figure 4.9 – Amplitude distortion of a square wave
- Figure 4.10 – Phase distortion of a square wave
- Figure 4.11 – Displacement potentiometer
- Threaded Design Example B.2 – DC motor power-op-amp speed controller – potentiometer interface (part a, part b)
- Figure 4.12 – First-order response
- Figure 4.13 – Experimental determination of τ
- Figure 4.14 – Second-order mechanical system and free-body diagram
- Figure 4.15 – Strip chart recorder as an example of a second-order system
- Figure 4.16 – Transient response of second-order systems
- Figure 4.17 – Second-order step responses
- Figure 4.18 – Features of an underdamped step response
- Figure 4.19 – Second-order system amplitude response
- Figure 4.20 – Second-order system phase response
- Design Example 4.1 – Automobile suspension selection (part a, part b, part c, part d, part e, part f)
- Figure 4.21 – Example of system analogies
- Figure 4.22 – Mechanical system analogy example
- Figure 4.23 – Beginning the analog schematic
- Figure 4.24 – Electrical system analogy example
- Chapter 5 – Mechatronic system components outline
- Figure 5.1 – Amplifier model
- Figure 5.2 – Op amp terminology and schematic
- Figure 5.3 – Op amp feedback
- Figure 5.4 – Op amp equivalent circuit
- Figure 5.5 – 741 op amp pin-out
- Figure 5.6 – 741 internal design
- Figure 5.7 – Inverting amplifier
- Figure 5.8 – Equivalent circuit for inverting amplifier
- Figure 5.9 – Illustration of inversion
- Figure 5.10 – Noninverting amplifier
- Figure 5.11 – Equivalent circuit for noninverting amplifier
- Figure 5.12 – Buffer or follower
- Threaded Design Example A.3 – DC motor power-op-amp speed controller – power amp motor driver (part a, part b)
- Figure 5.13 -Voltage divider follower voltage reference
- Figure 5.14 – Summer circuit
- Figure 5.15 – Difference amplifier circuit
- Figure 5.16 – Difference amplifier with V2 shorted
- Figure 5.17 – Difference amplifier with V1 shorted
- Figure 5.18 – Instrumentation amplifier
- Figure 5.19 – Ideal integrator
- Figure 5.20 – Improved integrator
- Figure 5.21 – Differentiator
- Figure 5.22 – Sample and hold circuit
- Figure 5.23 – Comparator
- Figure 5.24 – Comparator open collector output
- Figure 5.25 – Effect of slew rate on a square wave
- Figure 5.26 – Typical op amp open- and closed-loop response
- Figure 5.27 – Example op amp data sheet (part a, part b)
- Figure 5.28 – TL071 FET input op amp
- Example 5.1 – Sizing resistors in op amp circuits
- Design Example 5.1 – Myogenic control of a prosthetic limb (part a, part b, part c, part d, part e, part f, part g)
- Chapter 6 – Mechatronic system components outline
- Figure 6.1 – Analog and digital signals
- Figure 6.2 – AND gate timing diagram
- Figure 6.3 – OR gate timing diagram
- Example 6.2 – Combinational logic
- Figure 6.4 – AND realization schematic of the security system
- Example 6.4 – Sum of products and product of sums
- Figure 6.5 – Clock pulse edges
- Figure 6.6 – RS flip-flop
- Figure 6.7 – RS flip-flop internal design and timing
- Figure 6.8 – Edge-triggered RS flip-flops
- Figure 6.9 – Positive edge-triggered RS flip-flop timing diagram
- Figure 6.10 – Latch
- Figure 6.11 – Latch timing diagram
- Figure 6.12 – Preset and clear flip-flop functions
- Figure 6.13 – Positive edge-triggered D flip-flop
- Figure 6.14 – Negative edge-triggered JK flip-flop
- Figure 6.15 – Positive edge-triggered T flip-flop
- Example 6.5 – Flip-flop circuit timing diagram
- Figure 6.16 – Switch bounce
- Figure 6.17 – Switch debouncer circuit
- Figure 6.18 – 4-bit data register
- Figure 6.19 – 4-bit binary counter
- Figure 6.20 – Serial-to-parallel converter
- Figure 6.21 – Parallel-to-serial converter
- Figure 6.22 – TTL and CMOS input and output levels
- Figure 6.23 – TTL and CMOS output circuits
- Figure 6.24 – NAND gate internal design
- Figure 6.25 – QUAD NAND gate IC pin-out
- Figure 6.26 – DM74LS00 NAND gate IC data sheet
- Figure 6.27 – CMOS 4011B NAND gate internal design
- Figure 6.28 – CMOS 4011B NAND gate IC data sheet
- Figure 6.29 – Open collector output with pull-up resistor
- Figure 6.30 – Interfacing TTL to digital devices
- Figure 6.31 – Interfacing CMOS to digital devices
- Figure 6.32 – Decade counter timing
- Figure 6.33 – Cascaded decade counters
- Figure 6.34 – Seven-segment LED display
- Figure 6.35 – Two-digit LED display and a 7447 display decoder
- Figure 6.36 – 7447 internal design
- Figure 6.37 – 7447 output circuit
- Figure 6.38 – Input and output of a Schmitt trigger
- Figure 6.39 – Schmitt trigger SPST debounce circuit
- Figure 6.40 – Block diagram of the 555 IC
- Figure 6.41 – 555 pin-out
- Figure 6.42 – Monostable multivibrator (one-shot)
- Figure 6.43 – One-shot timing
- Figure 6.44 – Astable pulse generator
- Figure 6.45 – Astable multivibrator capacitor voltage and output signal
- Design Example 6.1 – Digital tachometer (part a, part b)
- Design Example 6.2 – Digital control of power to a load using specialized ICs (part a, part b)
- Figure 6.46 – IEEE standard symbols for digital ICs
- Chapter 7 – Mechatronic system components outline
- Figure 7.1 – Microcomputer architecture
- Figure 7.2 – Components of a typical full-featured microcontroller
- Figure 7.3 – PIC16F84 block diagram
- Figure 7.4 – PIC16F84 pin-out and required external components
- Figure 7.5 – Required PIC16F84 components on a breadboard
- Figure 7.6 – Reset switch circuit
- Example 7.2 – Assembly language programming example
- Figure 7.7 – Circuit schematic for the flash.bas example
- Example 7.5 – PicBasic Pro program for security system example
- Example 7.6 – Graphically displaying the value of a potentiometer
- Design Example 7.1 – Option for driving a seven-segment digital display with a PIC (part a, part b, part c)
- Figure 7.8 – Interrupt example schematic
- Figure 7.9 – Arduino UNO
- Figure 7.10 – Numeric keypad
- Figure 7.11 – Photograph of 12-key and 16-key numeric keypads
- Figure 7.12 – Numeric keypad schematic and PIC interface
- Figure 7.13 – Photograph of an LCD
- Figure 7.14 – LCD PIC interface
- Threaded Design Example C.2 – DC motor position and speed controller – keypad and LCD interfaces (part a, part b)
- Figure 7.15 – Block diagram for pins RA0 through RA3
- Figure 7.16 – Block diagram for pin RA4
- Figure 7.17 – Block diagram for pins RB4 through RB7
- Figure 7.18 – Block diagram for pins RB0 through RB3
- Figure 7.19 – Interface circuits for input devices
- Figure 7.20 – Interface circuits for output devices
- Example 7.8 – PIC A/D conversion, Serial Communication, and LCD Messaging (part a, part b)
- Figure 7.21 – Software flowchart building blocks
- Design Example 7.2 – PIC solution to an actuated security device (part a, part b, part c, part d)
- Threaded Design Example A.4 – DC motor power-op-amp speed controller – full solution (part a, part b)
- Threaded Design Example B.2 – Stepper motor position and speed controller – full solution (part a, part b)
- Threaded Design Example C.3 – DC motor position and speed controller – full solution with serial interface (part a, part b)
- Figure 7.22 – Low-cost power supply options
- Figure 7.23 – Example of a full-featured instrumentation power supply
- Figure 7.24 – 7805 voltage regulator connections
- Figure 7.25 – Specifications for an example closed-frame power supply
- Figure 7.26 – Example battery discharge curve
- Chapter 8 – Mechatronic system components outline
- Figure 8.1 – Analog signal and sampled equivalent
- Figure 8.2 – Aliasing
- Example 8.1 – Sampling theorem and aliasing
- Figure 8.3 – Original sine wave signal to be sampled
- Figure 8.4 – Sine wave signal sampled at a rate slightly faster than the Nyquist rate
- Figure 8.5 – Sinc wave
- Figure 8.6 – Reconstructed signal, compared to the original
- Figure 8.7 – Analog-to-digital conversion
- Figure 8.8 – Components used in A/D conversion
- Figure 8.9 – Typical data acquisition hardware (NI cDAQ-9172)
- Figure 8.10 – Example data acquisition and control card (NI myDAQ)
- Figure 8.11 – A/D conversion aperture time
- Figure 8.12 – Successive approximation A/D converter
- Figure 8.13 – 4-bit successive approximation A/D conversion
- Figure 8.14 – A/D flash converter
- Figure 8.15 – 4-bit resistor ladder D/A converter
- Figure 8.16 – 4-bit resistor ladder D/A with digital input 0001
- Threaded Design Example A.5 – DC motor power-op-amp speed controller – D/A converter interface (part a, part b)
- Figure 8.17 – Computer control hardware
- Figure 8.18 – Example custom graphical user interface created with LabVIEW
- Figure 8.19 – Example LabVIEW block diagram
- Figure 8.20 – NI ELVIS II+ Laboratory Platform
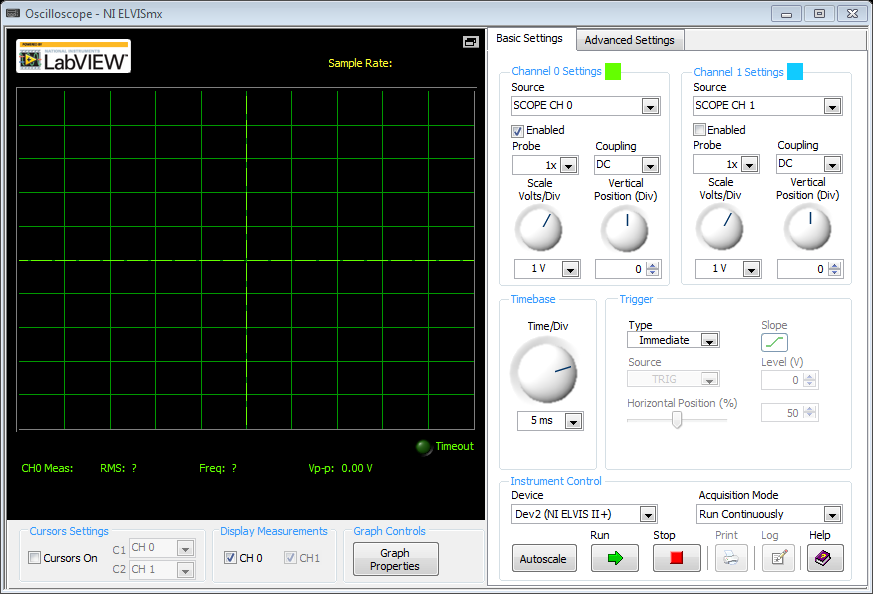
- Figure 8.21 – NI ELVIS Virtual Oscilloscope
- Figure 8.22 – Example block diagram
- Figure 8.23 – Example front panel
- Figure 8.24 – The USB 6009 connected to the computer with the screw terminals attached
- Section 8.6.3 – Creating a VI and sampling music (part a, part b, part c)
{kind=link}
- Chapter 9 – Mechatronic system components outline
- Figure 9.1 – Various configurations for photoemitter-detector pairs
- Figure 9.2 – Switches
- Figure 9.3 – Photograph of various types of switches
- Figure 9.4 – Potentiometer
- Figure 9.5 – Photograph of a trim pot and a rotary pot
- Figure 9.6 – Linear variable differential transformer
- Figure 9.7 – LVDT linear range
- Figure 9.8 – LVDT demodulation
- Figure 9.9 – LVDT output filter
- Figure 9.10 – Components of an optical encoder
- Figure 9.11 – 4-bit gray code absolute encoder disk track patterns
- Figure 9.12 – 4-bit natural binary absolute encoder disk track patterns
- Figure 9.13 – Gray-code-to-binary-code conversion
- Figure 9.14 – Incremental encoder disk track patterns
- Figure 9.15 – Quadrature direction sensing and resolution enhancement
- Figure 9.16 – 1X quadrature decoder circuit
- Threaded Design Example C.4 – DC motor position and speed controller – digital encoder interface (part a, part b)
- Figure 9.17 – Metal foil strain gage construction
- Figure 9.18 – Rectangular conductor
- Figure 9.19 – Static balanced bridge circuit
- Figure 9.20 – Dynamic unbalanced bridge circuit
- Figure 9.21 – Leadwire effects in 1/4 bridge circuits
- Figure 9.22 – Mounted gage with three-wire connection
- Figure 9.23 – Temperature compensation with a dummy gage in half bridge
- Figure 9.24 – Bar under uniaxial stress
- Figure 9.25 – Biaxial stress in a long, thin-walled pressure vessel
- Figure 9.26 – General state of planar stress on the surface of a component
- Figure 9.27 – Assortment of different strain gage and rosette configurations
- Figure 9.28 – Most common strain gage rosette configurations
- Figure 9.29 – Rectangular strain gage rosette
- Figure 9.30 – Various three-gage commercial rosettes
- Figure 9.31 – Typical axial load cells
- Design Example 9.1 – A strain gage load cell for an exteriorized skeletal fixator
- Figure 9.32 – Bimetallic strip
- Figure 9.33 – Thermoelectric junction
- Figure 9.34 – Thermocouple circuit
- Figure 9.35 – Law of leadwire temperatures
- Figure 9.36 – Law of intermediate leadwire metals
- Figure 9.37 – Law of intermediate junction metals
- Figure 9.38 – Law of intermediate temperatures
- Figure 9.39 – Law of intermediate metals
- Figure 9.40 – Standard thermocouple configuration
- Figure 9.41 – Attaching leadwires of selected metal
- Figure 9.42 – Thermopile
- Figure 9.43 – Thermocouple types and characteristics
- Figure 9.44 – Accelerometer displacement references and free-body diagram
- Figure 9.45 – Ideal accelerometer amplitude response
- Figure 9.46 – Ideal accelerometer phase response
- Figure 9.47 – Vibrometer amplitude response
- Figure 9.48 – Piezoelectric accelerometer construction
- Figure 9.49 – Equivalent circuit for piezoelectric crystal
- Figure 9.50 – Thevenin equivalent of piezoelectric crystal
- Figure 9.51 – Piezoelectric accelerometer frequency response
- Figure 9.52 – Surface acoustic wave transponder device
- Chapter 10 – Mechatronic system components outline
- Figure 10.1 – Right-hand rule for magnetic force
- Figure 10.2 – Solenoids
- Figure 10.3 – Voice coil
- Figure 10.4 – Photograph of a voice coil iron core and coil
- Figure 10.5 – Classification of electric motors
- Figure 10.6 – Motor construction and terminology
- Figure 10.7 – Examples of commercial motors
- Figure 10.8 – Electric motor field-current interaction
- Figure 10.9 – Electric motor six-winding commutator
- Figure 10.10 – Electric motor field-field interaction
- Figure 10.11 – Motor torque-speed curve
- Figure 10.12 – DC permanent magnet motor schematic and torque-speed curve
- Figure 10.13 – DC shunt motor schematic and torque-speed curve
- Figure 10.14 – DC series motor schematic and torque-speed curve
- Figure 10.15 – DC compound motor schematic and torque-speed curve
- Figure 10.16 – Motor armature equivalent circuit
- Figure 10.17 – Permanent magnet DC motor characteristics
- Figure 10.18 – Pulse width modulation of a DC motor
- Figure 10.19 – PWM velocity feedback control
- Figure 10.20 – PWM voltage and motor current
- Figure 10.21 – H-bridge current-direction control
- Figure 10.22 – BJT H-bridge with flyback protection
- Figure 10.23 – DPDT relay H-bridge
- Figure 10.24 – Stepper motor step sequence
- Design Example 10.1 – H-bridge drive for a DC motor (part a, part b, part c)
- Threaded Design Example C.5 – DC motor position and speed controller – H-bridge and PWM speed control (part a, part b)
- Figure 10.25 – Dynamic response of a single step
- Figure 10.26 – Stepper motor torque-speed curves
- Figure 10.27 – Standard unipolar stepper motor field coil schematic
- Figure 10.28 – Example of a unipolar stepper motor
- Figure 10.29 – Standard bipolar stepper motor field coil schematic
- Figure 10.30 – Typical stepper motor rotor and stator configuration
- Figure 10.31 – Actual stepper motor rotor
- Figure 10.32 – Unipolar stepper motor full-step drive circuit
- Figure 10.33 – Timing diagram for full-step unipolar stepper motor drive circuit
- Threaded Design Example B.3 – Stepper motor position and speed controller – stepper motor driver (part a, part b)
- Figure 10.34 – Typical RC servomotor
- Figure 10.35 – RC servo PWM
- Figure 10.36 – Typical stepper motor performance curves
- Figure 10.37 – Typical servomotor performance curves
- Figure 10.38 – Motor operating speed
- Figure 10.39 – Hydraulic system components
- Figure 10.40 – Gear pump
- Figure 10.41 – Vane pump
- Figure 10.42 – Swash plate piston pump
- Figure 10.43 – Pressure regulator
- Figure 10.44 – 4/3 valve schematic
- Figure 10.45 – Double-acting hydraulic cylinder
- Figure 10.46 – Check and poppet valves
- Figure 10.47 – Spool valve
- Figure 10.48 – Pilot-operated spool valve
- Figure 10.49 – Single-acting and double-acting cylinders
- Figure 10.50 – Example mechanisms driven by a hydraulic cylinder
- Figure 10.51 – Pneumatic system components
- Chapter 11 – Mechatronic system components outline
- Figure 11.1 – Ladder logic symbols and basic functions
- Figure 11.2 – Ladder logic motor control cycle example
- Figure 11.3 – Armature-controlled DC motor
- Figure 11.4 – Block diagram for the DC motor system (plant)
- Figure 11.5 – Simulink model block diagram
- Figure 11.6 – The angular velocity output for a step input voltage
- Figure 11.7 – General feedback control system
- Figure 11.8 – Simulink model of an example motor with a PID controller
- Figure 11.9 – The effects of various proportional gains
- Figure 11.10 – The effects of various derivative gains
- Figure 11.11 – The effects of various integral gains
- Figure 11.12 – Analog PID controller constructed from op amp circuits
- Figure 11.13 – Project phases
- Figure 11.14 – System overview
- Figure 11.15 – MAX232 level converter
- Figure 11.16 – Serial port
- Figure 11.17 – Conditioning circuit diagram
- Figure 11.18 – Conditioning circuit PCB layout
- Figure 11.19 – Conditioning circuit photo
- Figure 11.20 – PIC to Adept interface circuit
- Figure 11.21 – A/D converter PIC flowchart
- Figure 11.22 – Interface PIC flowchart
- Figure 11.23 – Example of coin counter presentation mechanisms (part a, part b, part c)
- Figure 11.24 – Sensor array and chute design
- Figure 11.25 – TTL outputs corresponding to different coins
- Figure 11.26 – Counter design 1 (part a, part b)
- Figure 11.27 – Counter design 2 (part a, part b)
- Figure 11.28 – Student-designed walking machines from Colorado State University
- Figure 11.29 – Aluminum frame and telescoping pneumatic legs
- Figure 11.30 – Flowchart for forward motion routine
- Figure 11.31 – Pneumatic system
- Figure 11.32 – Computer ports and I/O board